
MibÅl lesz a (cserebogÃĄr) mÃĐrnÃķk?
Ezen bejegyzÃĐssel kezdetÃĐt veszi Blog-sorozatom az Enterprise Group PLM ÞzletÃĄgÃĄnak csapatÃĄban. A kÃķzzÃĐtett cikkek tematikÃĄja a 3D modellezÃĐs, szimulÃĄciÃģ ÃĐs automatizÃĄlÃĄs, mely tÃĐmÃĄkat egy -bÃĄr nem laikus- de pÃĄlyakezdÅ gyakornok szempontjÃĄbÃģl fogom vizsgÃĄlni. Ez a sorozat tehÃĄt alapjÃĄul szolgÃĄlhat azon kÃĐrdÃĐs megvÃĄlaszolÃĄsÃĄnak mely Úgy hangzik:
-
MibÅl lesz a cserebogÃĄr mÃĐrnÃķk?
MielÅtt az Enterprise Grouppal kÃķzÃķs egyÞttmÅąkÃķdÃĐsÞnket elkezdtÞk volna, ÃķnkÃĐpzÅ jelleggel foglalkoztam a 3D tervezÃĐs elsajÃĄtÃtÃĄsÃĄval. BÃĄr az internet mÃĄra az informÃĄciÃģ vÃĐgelÃĄthatatlan forrÃĄsÃĄvÃĄ vÃĄlt, mÃĐgsem ÃĐreztem azt, hogy a tanulÃĄs a lehetÅ legmagasabb hatÃĄsfokon Þzemelne. Ezen a helyzeten vÃĄltoztattak ÚjdonsÞlt kollÃĐgÃĄim, akik nagyszerÅą szakÃĐrtÅk mÃģdjÃĄra, kÃĐzenfogva vezetnek a modellezÃĐs elsajÃĄtÃtÃĄsÃĄhoz vezetŠÚton. Nem is vÃĄrtam mÃĄst, hiszen Åk ÃĐppen ebben a legjobbak. Arra invitÃĄlom hÃĄt a kedves OlvasÃģkat, jÃĄrjuk be kÃķzÃķsen a fentebb emlÃtett utat.
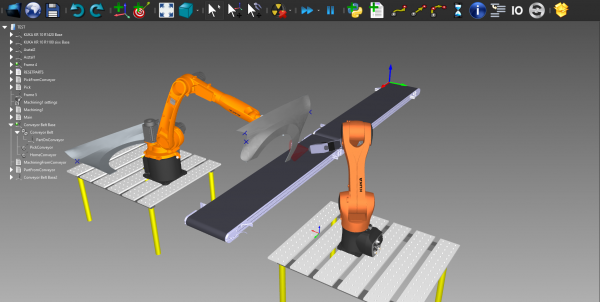
Fontos megemlÃteni, hogy mi az, amivel szÃĄmomra lehetÅvÃĐ tettÃĐk, hogy becsatlakozzak ebbe az egyÃĐbkÃĐnt folyamatosan vÃĄltozÃģ ÃĐs fejlÅdÅ irÃĄnyzatba. HozzÃĄfÃĐrÃĐst kaptam ugyanis a legkorszerÅąbb szoftverekhez, melyeket termÃĐszetesen mÃĄr nem (csak) otthoni hasznÃĄlatra fejlesztettek. TÃķbbek kÃķzÃķtt a Solid Edge ÃĐs a RoboDK szoftverek mÅąkÃķdÃĐsÃĐbe volt szerencsÃĐm belekÃģstolni, Ãgy elsÅ kÃķrben az ezekkel kapcsolatos tapasztalataimat, elsÅ benyomÃĄsaimat szeretnÃĐm megosztani.
-
Egy teljes portfÃģliÃģ
Mint korÃĄbban emlÃtettem nem a Solid Edge volt az elsÅ tervezÅszoftver, melyet kiprÃģbÃĄltam. KevÃĐs tapasztalatommal is sikerÞlt azonban azt a kÃķvetkeztetÃĐst levonni, hogy szÃĄmos szoftver, szÃĄmos irÃĄnybÃģl kÃķzelÃti meg ugyanazon problÃĐmÃĄt. Mondhatni ahÃĄny platform, annyi megoldÃĄs. Ez legtÃķbb esetben arra kÃĐnyszerÃti a felhasznÃĄlÃģt, hogy szimultÃĄn vegyen igÃĐnybe tÃķbbet a fent emlÃtettekbÅl ÃĐs egyikkel orvosolja a mÃĄsik hiÃĄnyossÃĄgÃĄt. Viszont nem minden esetben van ez Ãgy.
MÃĄr-mÃĄr ijesztÅ tapasztalatnak tudnÃĄm leÃrni az elsÅ talÃĄlkozÃĄsomat a Solid Edge-el. Nem is prÃģbÃĄltam magam elÅl leplezni fÃĐlelmemet miszerint ez nekem tÚl sok/tÚl bonyolult lesz. Hamar realizÃĄltam azonban, hogy amit elsÅ lÃĄtÃĄsra tÚl soknak vagy bonyolultnak ÃtÃĐltem, azokkal mind talÃĄlkoztam korÃĄbban, csupÃĄn egy helyen, egyszerre megjelenni nem lÃĄttam mÃĐg Åket. Amit a Solid Edge kÃnÃĄl az egy teljes, mindenre kiterjedÅ portfÃģliÃģ, mely ÃĄthidalja a korÃĄbban kifejtett problÃĐmÃĄt. Egyszerre jelent megoldÃĄst a lehetÅ legtÃķbb nehÃĐzsÃĐgre anÃĐlkÞl, hogy mankÃģkÃĐnt kÃĐne igÃĐnybe vennÞnk egy mÃĄsik alkalmazÃĄst.
-
Nem csak egy sÅąrÃtmÃĐny
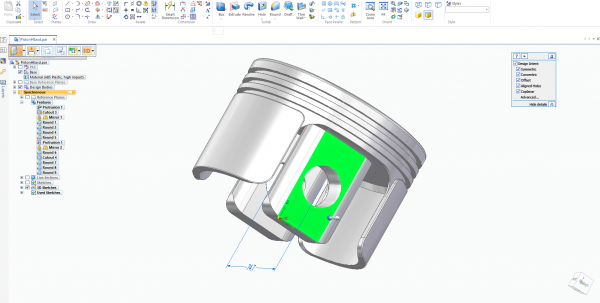
KÃķnnyen hihetnÃĐnk ezek utÃĄn, hogy a Solid Edge nem mÃĄs, mint a mÃĄshol mÃĄr lÃĄtott anyag ÃķsszegyÚrÃĄsa egy nagy ÃĐs zavaros masszÃĄvÃĄ. RÃķvid hasznÃĄlat utÃĄn rÃĄjÃķhetÞnk: ez a kijelentÃĐs korÃĄntsem ÃĄllja meg a helyÃĐt. SzÃĄmos sajÃĄt, Új ÃĐs ÃķnÃĄllÃģ technolÃģgia tÃĄrsul hozzÃĄ, melyekkel mÃĄshol mÃĐg nem talÃĄlkoztam. LÃĐnyeges tovÃĄbbÃĄ, hogy az egyes terÞletei kÃķzÃķtt zÃķkkenÅmentes, gyors ÃĐs egyszerÅą az ÃĄtjÃĄrÃĄs. Pillanatokon belÞl vihetem ÃĄt modellemet alkatrÃĐsz modellezÃĐsi felÞletrÅl a lemezalkatrÃĐsz tervezÃĐsi felÞletre, vagy nÃĐhÃĄny kattintÃĄssal szimulÃĄciÃģkat is vÃĐgezhetek a digitÃĄlis munkadarabomon. A szÃĄmos ÃĐs ÃĄltalam mÃĄr megismert funkciÃģk szÅąk metszetÃĐbÅl szemÃĐlyes kedvencemet szeretnÃĐm kiemelni, ez pedig nem mÃĄs mint a szinkron modellezÃĐs.
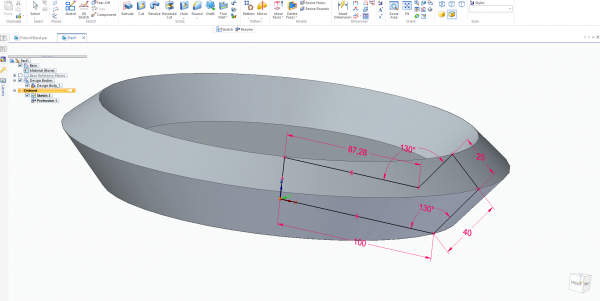
TekerjÞnk vissza a (nem is olyan tÃĄvoli) mÚltba, mikor elÅszÃķr prÃģbÃĄltam a modellezÃĐst. Mint mindenki a lehetÅ legegyszerÅąbb formÃĄkkal kezdtem: 2D-ben tÃĐglalapot rajzoltam, majd azt tÃĐrbeli hasÃĄbbÃĄ hÚztam ki. A kÃķvetkezÅ lÃĐpÃĐs a mÃĄr meglÃĐvÅ geometria mÃģdosÃtÃĄsa. VariÃĄlni a mÃĐreteit: magassÃĄgÃĄt, mÃĐlysÃĐgÃĐt esetleg egy Újabb tÃĐrbeli elemet kivonni vagy hozzÃĄadni. Az ember mÃĄr az ilyen egyszerÅą feladatoknÃĄl megtapasztalhatja, hogy egÃĐszen Új mÃģdon kell gondolkoznunk. Egy Új lÃĄtÃĄsmÃģd elsajÃĄtÃtÃĄsÃĄra van szÞksÃĐg, ami mÃg valakinek egyszerÅąen mehet, mÃĄsok Úgy ÃĐrezhetik nem ÃĄll kÃĐzre a mÃģdszer. A kihÚzott test mÃģdosÃtÃĄsÃĄhoz a modell(-tÃķrtÃĐnet) elejÃĐre kell ugyanis ugranunk ÃĐs a rendszert mondhatni gyÃķkerestÅl megvÃĄltoztatnunk. Hogy matematikai hasonlattal ÃĐljek, egÃĐszen a variÃĄlandÃģ paramÃĐter forrÃĄsÃĄhoz kell visszalÃĐpnÞnk, majd ez alapjÃĄn a fÞggvÃĐny eredmÃĐnyÃĐt âÚjraszÃĄmolnunkâ. TalÃĄn nem nehÃĐz kitalÃĄlni, ÃĐn azon felhasznÃĄlÃģk kÃķzÃĐ esek, akiknek ez kevÃĐsbÃĐ kÃĐzenfekvÅ. MÃĄs technikÃĄt kellett talÃĄlnom. A szinkronmodellezÃĐs a szememben az ezen hiÃĄnyossÃĄg ÃĄltal okozott Åąrt tÃķltÃķtte be. A modell-tÃķrtÃĐnet elhagyÃĄsÃĄval a vÃĄzlat a tervezÃĐs alapjÃĄbÃģl a tervezÃĐs eszkÃķzÃĐvÃĐ vÃĄlt. A fÃģkusz immÃĄr inkÃĄbb a modellen van, mintsem a szoftver hasznÃĄlatÃĄn. KÃķzvetlenÞl a modellel dolgozhatunk, ahelyett, hogy az azokat felÃĐpÃtÅ vÃĄzlatokkal.
Mindez rugalmassÃĄgot, gyorsasÃĄgot jelent ÃĐs nem mellesleg azt is, hogy az importÃĄlt modellekkel valÃģ munkÃĄt nagyban megkÃķnnyÃti, hiszen nem kell arra koncentrÃĄlnunk, mi miÃĐrt ÃĐs hogyan jÃķtt lÃĐtre a modellen. EzÃĄltal sokkal termÃĐszetesebbnek hat a hÃĄromdimenziÃģs tervezÃĐs. TermÃĐszetesen a hagyomÃĄnyos mÃģdszer kedvelÅinek sem kell aggÃģdnia, a kÃĐt mÃģdszer kÃķzÃķtt ugyanis (legalÃĄbbis szinkronbÃģl hagyomÃĄnyosba) bÃĄrmikor vÃĄlthatunk.
-
TÃĐvkÃĐpzet utÃĄn megkÃķnnyebbÞlÃĐs
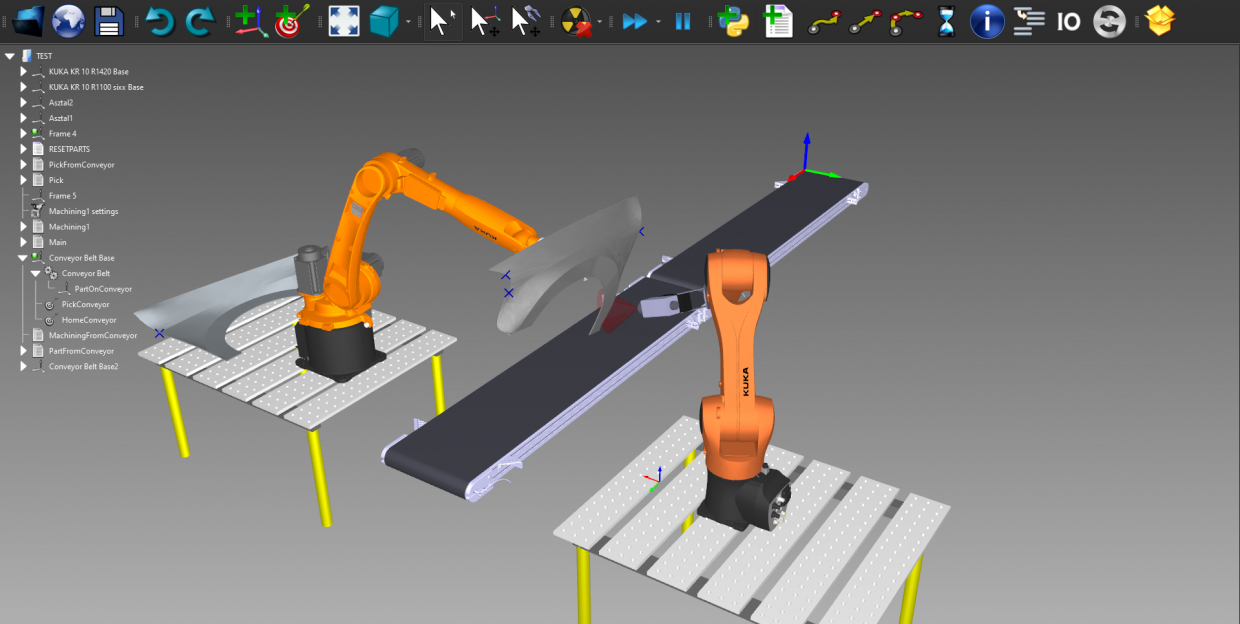
Ezek utÃĄn ejtsÞnk nÃĐhÃĄny szÃģt a RoboDK-rÃģl. Mechatronikai mÃĐrnÃķk hallgatÃģkÃĐnt a robotprogramozÃĄs tÃĐmÃĄja kÃķzel ÃĄll az ÃĐrdeklÅdÃĐsi kÃķrÃķmhÃķz. Ennek ellenÃĐre, ha rÃĄ gondoltam sokÃĄig az a koncepciÃģ ÃĐlt a fejemben, hogy mint  minden mÃĄs programozÃĄsi terÞletnÃĐl, ez is Úgy tÃķrtÃĐnik, hogy egy nyelv szintaxisÃĄnak elsajÃĄtÃtÃĄsa utÃĄn hosszas sorokat kell kÃģdolni a legaprÃģbb rÃĐszletekre valÃģ odafigyelÃĐs mellett (persze a robotprogramozÃĄs Ãgy is lehetsÃĐges). AztÃĄn tanulmÃĄnyaim sorÃĄn letisztÃĄztÃĄk, hogy a programozÃĄsnak nem csak ezen mÃģdja lÃĐtezik, vannak egÃĐszen mÃĄs, pÃĐldÃĄul grafikus programozÃĄsi lehetÅsÃĐgek. Ãgy is teljes meglepetÃĐskÃĐnt ÃĐrt, amikor elÅszÃķr lÃĄttam, hogy van egy szoftver, amiben robotok teljes, valÃģsÃĄghÅą digitÃĄlis mÃĄsaival ÃĐs azok szimulÃĄlÃĄsÃĄval tudunk dolgozni.
AzÃģta eltelt mÃĄr nÃĐhÃĄny hÃģnap ÃĐs lezajlott jÃģpÃĄr virtuÃĄlis gyÃĄrtÃĄsi ciklus a szÃĄmÃtÃģgÃĐpem fÃĄjlkezelÅjÃĐben, ki-prÃģbÃĄlgattam, -puhatolÃģztam ezt az Új ÃĐlmÃĐnyt. ÃsszeÃĄllÃtottam kÞlÃķnbÃķzÅ szimulÃĄciÃģkat, importÃĄltam ÃĄltalam modellezett robotokat illetve alkatrÃĐszeket ÃĐs igazÃĄn Úgy ÃĐreztem: egyarÃĄnt feszegetem a sajÃĄt ÃĐs a program hatÃĄrait is. RendkÃvÞl hasznosnak talÃĄlom azt, hogy a felhasznÃĄlÃģ azonnali ÃĐs lÃĄtvÃĄnyos visszajelzÃĐst kap arrÃģl, hogy pontosan mit is kÃĐszÃtett el. MiutÃĄn a programot ÃķsszeÃĄllÃtottuk, a lejÃĄtszÃĄs sorÃĄn nem csak arrÃģl kapunk informÃĄciÃģt, hogy sikerÞlt-e a mÅąvelet illetve hogy egyÃĄltalÃĄn lefuttathatÃģ-e a procedÚra.  A teljes folyamat ÃĄtlÃĄthatÃģ, a hibakeresÃĐs pedig sokkal egyszerÅąbb.
A modellek importÃĄlÃĄsÃĄnak opciÃģja pedig lehetÅvÃĐ teszi, hogy imitÃĄljuk a valÃģs kÃķrnyezetet. Ezt a tervezÅprogramokba ÃĐpÃthetÅ pluginok mÃĐg egyszerÅąbbÃĐ teszik. Az elkÃĐszÞlt modelleket egy kattintÃĄssal exportÃĄlhatom a RDK-ba vagy hasonlÃģmÃģd frissÃthetem a mÃĄr meglÃĐvÅk tulajdonsÃĄgait. Ugyanilyen egyszerÅąen, mÃĐg a tervezÅszoftverben jelÃķlhetem ki, hogy milyen pÃĄlyÃĄt tegyen meg a robotomra csatlakoztatott szerszÃĄmfej, melyet kÃĐsÅbb, mÃĄr a RoboDK berkein belÞl finom hangolhatok.
-
KarnyÚjtÃĄsnyira a segÃtsÃĐg
HozzÃĄ kell tennem, hogy a RoboDK hivatalos, bÃĄrki szÃĄmÃĄra elÃĐrhetÅ online ÚtmutatÃģjÃĄban rendkÃvÞl hasznos informÃĄciÃģk vÃĄrjÃĄk az ÃĐrdeklÅdÅket az interneten. (Basic Guide – RoboDK Documentation) Erre pedig mitagadÃĄs, a programmal ismerkedÅknek szÞksÃĐge is lehet, nehogy elvesszenek a csÚszkÃĄk, menÞpontok ÃĐs konfigurÃĄciÃģk ÚtvesztÅjÃĐben.
JÃģl lÃĄthatÃģ tehÃĄt, hogy a fejlesztÅk mindkÃĐt esetben prÃģbÃĄltÃĄk kidolgozni a leginkÃĄbb felhasznÃĄlÃģbarÃĄt ÃĐs effektÃv kezelÅfelÞletet illetve mÅąkÃķdÃĐst. Ezen eszkÃķzÃķk ismeretÃĐvel a munka egyszerÅą ÃĐs gyors tud lenni. Nem is kÃĐtsÃĐg viszont, hogy megismerÃĐsÞkhÃķz idÅ ÃĐs gyakorlÃĄs szÞksÃĐges. Alig vÃĄrom, hogy tovÃĄbbi darabjait ismerjem meg a Solid Edge ÃĐs RoboDK eszkÃķz arzenÃĄljÃĄnak, amennyiben Ãgy tÃķrtÃĐnik pedig egÃĐsz biztosan jelentkezek tovÃĄbbi bejegyzÃĐsekkel. Addig is jÃģ modellezÃĐst Mindenkinek!
SzerzÅ: SzabÃģ BalÃĄzs – gyakornok